|
|
|||||||||||||||
|
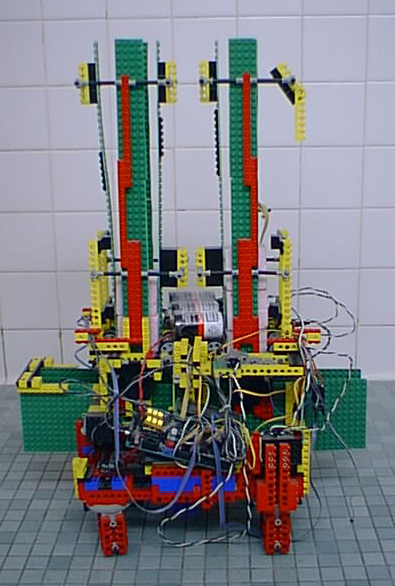
BEHEMOTH The Behemoth was a joint project between Sawyer Buckminster Fuller and myself. We were both TAing the class 6.270 and decided to create a gigantic robot that would re-setup the playing field at the end of each round. This robot used 7 different motors controlled by 2 seperate boards communicating with each other over a hacked communication line.
|
|||||||||||||||
|
|
|
|
|
|
|
||||||||||
|
© 2003 Colin Bulthaup - colin@bulthaup.org
|
|||||||||||||||